SYSTEM ARCHITECTURE
As depicted in the above figure, the system consists of six basic modules: a Geometric Engine, a Population Generator, a Global Database, a Crowd Simulation Engine, an Events Recorder, and a Visualization Environment.
The purpose of the Geometric Engine is to produce the geometries representing the physical environments (e.g., a building or a train station, etc.). Spatial information, including obstacles, exits, spaces, spatial layouts, exit signs, etc.., is most conveniently defined using CAD tools such as AutoCAD/ADT (Architectural Desktop Software).
|
|
|
|
Geometric info. in ADT |
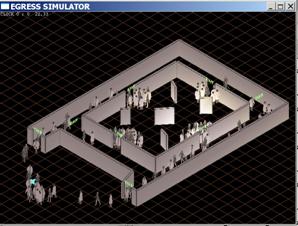
Egress simulation as shown in Visualizer |
The Population Generator generates virtual agents to represent a crowd based on the distribution of age, mobility, physical size, type of facility (hospital, office building, train station, stadium, etc.) and other human factors. The population, its composition, and occupants’ behavior would be different for different facility type. This module allows the user to easily generate occupants and specify space assignments.
The Global Database is to maintain all the information about the physical environment and the agents during the simulation. It maintains the state information (mental tension, behavior level, location) of the individuals. The database is also used to support the interactions and reactions among the individuals.
The Events Recorder is intended to capture the events that have been simulated for retrieval and playback. The simulated results can be recorded for further analyses, for example, to derive evacuation patterns and statistical information. The events captured can also be used to compare with known and archived scenarios.
The Crowd Simulation Engine is the key module of the multi-agent simulation system. Based on the behavior models and rules classified, each agent is assigned with an “individual behavior model” based on the data generated from the population generator. An Individual Behavior Model is composed of three subsystems – a Perception System, a Behavior System, and a Motor System. The Perception System receives sensory (such as visual or audio) and surrounding information. The Behavior System determines ‘what’ to do by each agent as the agent responds to its surrounding environment using the behavior rules and initiates actions and reactions accordingly. Depending on the environment and the behavior levels of individuals and their relationships with the group, the agent interacts with other agents and reacts in a collaborative or competitive manner. The Motor System specifies ‘how’ an agent maneuvers in an environment by controlling its movement once a particular behavior is selected.
Visualization is important to display the simulation results. The Visualizer, which is currently built using OpenGL, receives the positions of agents, and then dynamically generates and displays 2D/3D visual images.
If you have any comments or suggestions, please send them to xpan@stanfordalumni.org || Back to main page