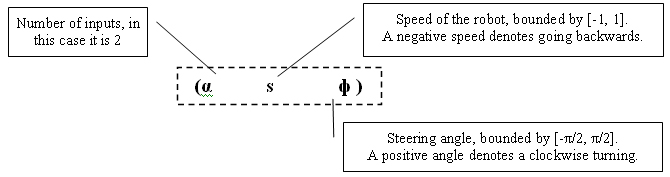
Descriptions of Input Vectors
The State Transition Equation for A Wheelchair in 2D Spaces
Let each state of the robot be represented as (x, y, ө), where (x, y) denotes the coordinates of the robot in a 2D configuration space, ө denotes the facing direction of the robot. Then we have the following State Transition Equation (also see Differential Models, Steven LaValle, 2001):
x = s*cos ө
y = s*sin ө
ө = s/L*tan ф
Where
s —speed of the robot
L—length of the robot
ф—steering angle.
An input vector has a following format
Implementation
See model2d.cpp of Motion Strategy Library, line 326
MSLVector Model2DRigidCar::StateTransitionEquation
(const MSLVector &x, const MSLVector &u)
{
MSLVector dx(3);
dx[0] = u[0]*cos(x[2]);
dx[1] = u[0]*sin(x[2]);
dx[2] = u[0]*tan(u[1])/CarLength;
return dx;
}
Examples
An input file
2 1.0 0.0
2 1.0 0.4
2 1.0 -0.4
means that each state of the robot can derive three new states by applying the above State Transition Equations:
1. going straight forward,
2. making a right turn while going forward, and
3. making a left turn while going forward.
If an initial state and a goal state are given, the path planning problem in fact is a search-tree problem:
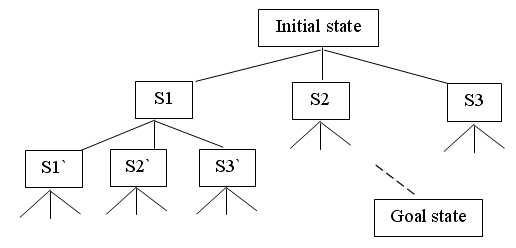
In Motion Strategy Library (MSL), this tree-like structure is the foundation for utilizing search strategies such as Rapidly-Exploring Random Trees (RRT) and A*.
Another Inputs file
2 1.0 0.0
2 1.0 0.1
2 1.0 -0.1
2 -1.0 0.0
2 -1.0 0.1
2 -1.0 -0.1
means that each state of the robot can derive six new states by applying the State Transition Equations:
1. going straight forward,
2. making a right turn while going forward,
3. making a left turn while going forward,
4. going straight backward,
5. making a right turn while going backward, and
6. making a left turn while going backward.
Important Highlights
· Value of s (i.e., speed) can be any float number between -1.0 and 1.0. A vector (2, 0, 0.2) will enable a robot to rotate clockwise by 0.2 (rad) at the same position.
· In the geometric description of a robot, (0, 0) denotes the middle point of the axle of the wheels, which also corresponds the position of the robot in a 2D configuration space.